Method
GAP addresses bottleneck collapse — a failure mode where the spatial pooling layer, trained with only a handful of demonstrations, latches onto background shortcuts instead of object-centric geometry. The fix is a short, action-free warm-up on a cheap proxy task (LiftCube in RoboMimic) using simulator-provided segmentation masks, with no expert action labels required.
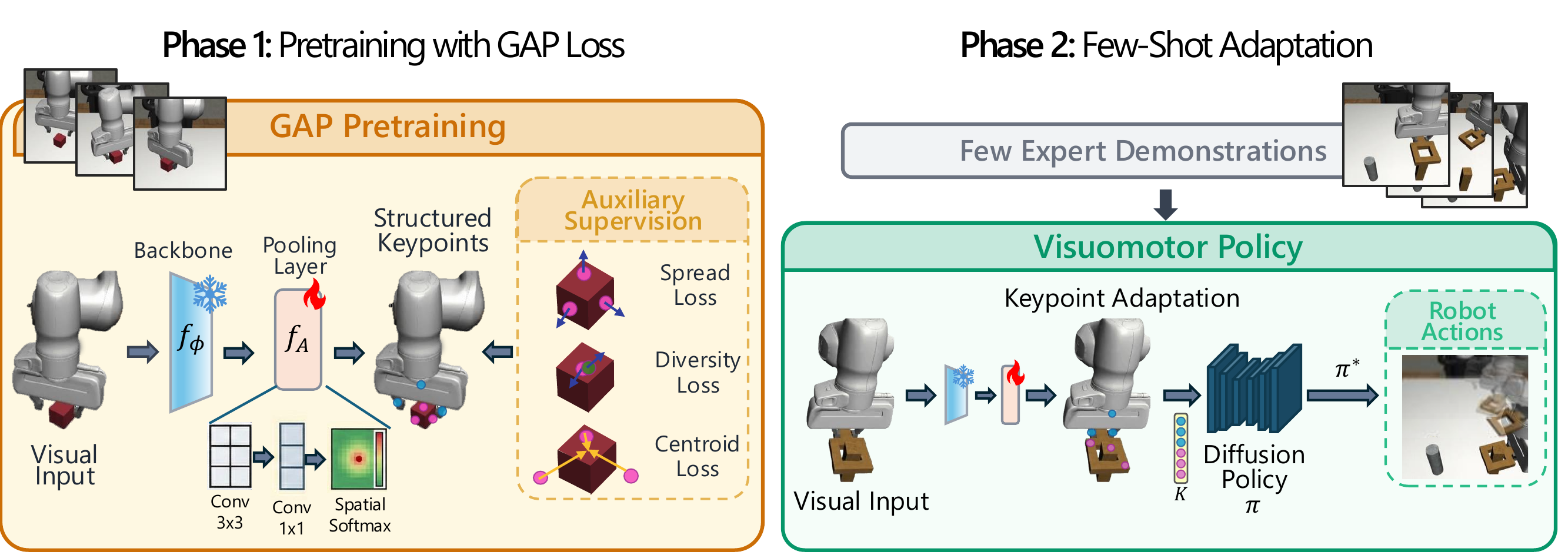
Centroid Alignment ($\mathcal{L}_{center}$)
$$\mathcal{L}_{center} = \| \bar{p}_t - c_t \|_2^2$$
Pulls the keypoint centroid onto the object mask centroid, grounding keypoints on task-relevant geometry rather than background distractors.
Geometric Spread ($\mathcal{L}_{spread}$)
$$\mathcal{L}_{spread} = \| \sigma_p - \sigma_{target} \|_2^2$$
Matches keypoint spatial variance to the object scale, preventing collapse to a single point and preserving orientation information.
Keypoint Diversity ($\mathcal{L}_{div}$)
$$\mathcal{L}_{div} = \frac{1}{K} \sum_{k=1}^K \left[ \max\left(0, \delta_{min} - \min_{j \neq k} \| p_{k,t} - p_{j,t} \|_2 \right) \right]^2$$
Enforces minimum separation between keypoints, encouraging coverage of distinct geometric extremities across the object surface.
Keypoints are partitioned per semantic entity in the scene, so each object receives its own subset of anchors. After GAP, the frozen encoder and regularized adapter transfer to downstream tasks — only the adapter and diffusion policy head are fine-tuned, with segmentation masks strictly discarded.